
EN

查询




2、人手一机:安全可靠:整机总重量仅1.5Kg,底盘直径160mm。一体化设计,体轻身小,让学生在课堂也能体验到实践的乐趣;
3、开源:可扩展:Mirobot作为首款迷你桌面级教育机械臂,为学生学习提供开源的运动学、视觉等算法。同时设备预留多个扩展接口,支持Python、C、C++、Java等多种编程语言,为学生学习创新提供全新的创新学习平台;
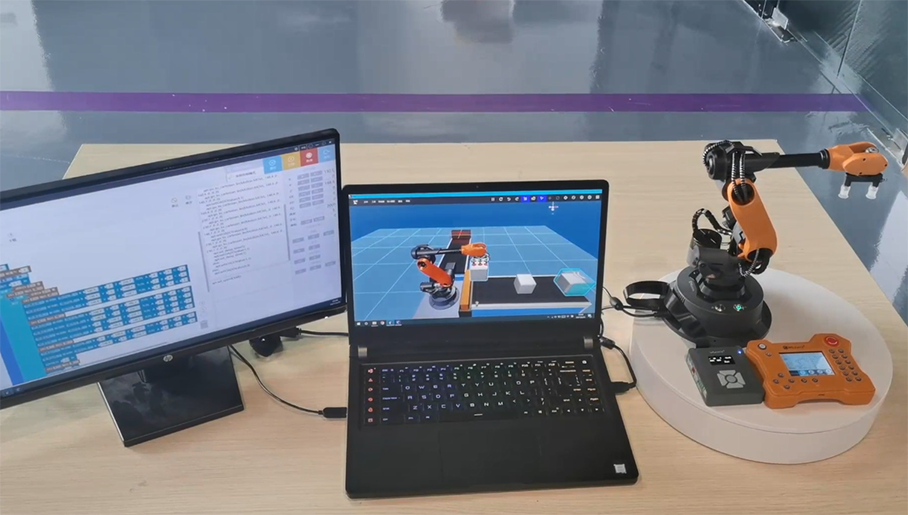
4、数字孪生:Mirobot 配置了1:1 的数字孪生仿真模型在IOA 之中,具有虚拟仿真 +虚实仿真功能特点,能够采用虚拟 +实体方式实现机器人本体 +智能控制的数字孪生集成应用。
5、1:1的虚拟化仿真,自定义拖拽式的设计机器人工作站产线; 1:1的虚实孪生控制仿真; 与实体工作站对应,能够实现人手一机产业结合的仿真应用。

